Инструменты пользователя
10i_2025_it
Содержание
10И: Введение в IT-специальность
Ресурсы
Яндекс Учебник
- https://education.yandex.ru/kids/ Вход для ученика
- У03300338 - код школы
Создание цифровых двойников
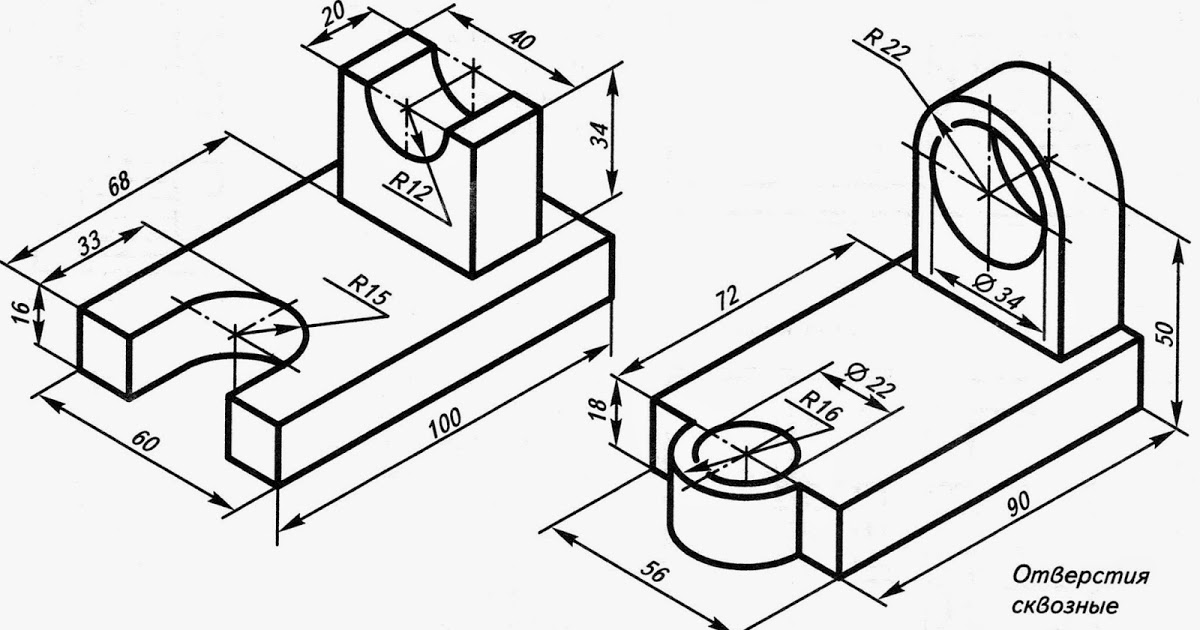
Черчение
- https://stepik.org/course/103610/syllabus Начальная инженерная подготовка (Черчение)
- https://stepik.org/lesson/626069/step/2?unit=621806 Правила нанесения размеров на чертежах
Виртуальная лаборатория
Рабочие тетради
- https://uchebnik.mos.ru/material/composed_document-76714357 - Черчение. Рабочая тетрадь № 2
- https://uchebnik.mos.ru/material/composed_document-76719197 - Черчение. Рабочая тетрадь № 3
- https://uchebnik.mos.ru/material/composed_document-76723593 - Черчение. Рабочая тетрадь № 4
Индивидуальные задания
- https://oreluniver.ru/public/file/chair/sapr/study/IG5.pdf ИНЖЕНЕРНАЯ ГРАФИКА.ГЕОМЕТРИЧЕСКОЕ ЧЕРЧЕНИЕ
- https://disk.yandex.ru/i/Z8pjvbyQyqG1YQ ИНЖЕНЕРНАЯ ГРАФИКА. ГЕОМЕТРИЧЕСКОЕ ЧЕРЧЕНИЕ
- https://forms.yandex.ru/cloud/67334b76eb614644d4419fe6/ ссылка на индивидуальные работы.
- https://www.perplexity.ai/search/izvestny-diametr-vysota-useche-GpvQJ6fbT6eqddm7Ap4MmQ Известны диаметр, высота усеченного конуса и конусность в процентах. Как найти врой диаметр?
Компас_3d
- https://stepik.org/course/87973/syllabus?auth=login - БАЗОВЫЙ КУРС
- https://stepik.org/join-class/bbeacd25d75297cec84f9c0be15038b1a24f7801 подключиться к классу Компас 3D для 10И

- https://stepik.org/lesson/444340/step/2?unit=434506 - Велосипедная бутылка для воды
- https://forms.yandex.ru/cloud/6745d270c417f3f0651ebaff/ Форма для прикрепления файла или ссылки на виртуальный диск
- https://disk.yandex.ru/d/F7JekpzCR4bKdQ - Модели Компас 3D
- https://rutube.ru/video/8727bf518ac24f0f95540bd7c181b905/?r=wd - поршень видео


- https://stepik.org/lesson/444342/step/1?auth=login&unit=434508 Операция по сечению. Ракета.
Алгоритмы построения 3D моделей (твердотельное моделирование)
Создание сборочных единиц
- https://stepik.org/lesson/444347/step/1?unit=434513 Создание сборочных единиц
- https://stepik.org/lesson/445440/step/1?unit=435703 Создание сборки вентиля
- https://forms.yandex.ru/cloud/67d428835056906066cbd6f4/ - форма для отчёта о проделанной работе.
Программирование микроконтроллеров
- https://stepik.org/course/69511/syllabus Arduino в online. Быстрый старт !!!
Wokwi arduino uno
- https://docs.wokwi.com/parts/wokwi-arduino-uno/ документация
- https://blog.wokwi.com/learn-arduino-using-ai-chatgpt/ I tried ChatGPT for Arduino - It’s Surprising
- https://uchebnik.mos.ru/material/512435?sharing_key=8f5898c3-43bc-40d4-99b5-862287fd3dfb Робот с дистанционным управлением
Регистры портов
Учебные курсы
Программа
Искусственный интеллект и генеративные нейросети
- Что такое ИИ и машинное обучение? История ИИ
- Что такое ИИ и машинное обучение? Модели машинного обучения
- Как устроены нейросети (теория)?
- Как устроены нейросети (практика)?
- Большие языковые модели (БЯМ или LLM). GPT
- Большие языковые модели (БЯМ или LLM). GPT
- Техники промтинга. Часть 1
- Техники промтинга. Часть 2
- Другие нейросети
- Создаём проект с нейросетями
- Введение в алгоритмы машинного обучения
- Введение в алгоритмы машинного обучения
- Способы применения нейронных сетей. Прогнозы на будущее.
- Подведение итогов, обсуждение пройденной темы. Рефлексия
Создание цифровых двойников
- Знакомство с Системами автоматизированного проектирования (англ. Computer-aided design (CAD)) или системами автоматизации проектных работ САПР ч1.
- Системы автоматизированного проектирования (англ. Computer-aided design (CAD)) ч2.
- Знакомство с программой КОМПАС 3Д. Интерфейс программы. Редактирование геометрии
- Ограничение и обозначение эскизов
- Операции выдавливания, вырезания и вращения
- Операция по траектории
- Операция по сечению. Возможности 3D-моделирования
- Операции вращения со сложным эскизом. Часть 1
- Операции вращения со сложным эскизом. Часть 2
- Операция по сечениям с применением направляющих кривых. Ч.1
- Операция по сечениям с применением направляющих кривых. Ч. 2
- Создание сборочных единиц
- Создание сборки
- Элементы поверхностного моделирования. Часть 1
- Элементы поверхностного моделирования. Часть 2
- Ассоциативные чертежи с модели
- Работа с переменными и исполнение детали
- Создание РКД (Рабочая Конструкторская Документация)
Робототехника (TRIK + Python)
- Среда TRIK Studio (интерфейс, меню, основные операции, загрузка шаблона решений, загрузка «модели мира», запуск программы, проверка решения)
- Управление моторами. Разбор и решение задач
- Обратная связь. Энкодеры
- Энкодеры. Управление моторами. Разбор и решение задач
- Обратная связь. Датчик расстояния (варианты использования)
- Датчик расстояния (разбор и решение задач)
- Регуляторы. Управление реалистичными моторами (равные значения на двух энкодерах)
- Релейный регулятов и П-регулятор (пропорциональный)
- Пропорциональное управление (задачи)
- Движение по линии. Датчик освещенности. Калибровка. П-регулятор
- ТАУ теория автоматического управления. Трасса с перекрёстками - 2 датчика
- Разбор и решение задач
- Разбор и решение задач
- Разбор и решение задач
Программирование микроконтроллеров
- Введение. Платы семейства Arduino
- Немного теории электроцепей
- Основы программирования. Arduino IDE
- Синтаксис программы (основные операторы, переменные, условия, циклы, функции
- Возможности микроконтроллера Arduino. Работа с GPIO
- Работа с сигналами. Датчики. Эффекторы
- Работа с сигналами. Практика
- Работа с сигналами. Практика
- Связь с внешним миром: UART, I2C, SPI, Bluetooth, Ethernet ч.1
- Связь с внешним миром: UART, I2C, SPI, Bluetooth, Ethernet ч.2
- Работа с информацией. Экраны
- Работа с информацией. Хранение данных
- Лабораторная работа. Управление моторами.
- Лабораторная работа. Управление сервоприводами.
- Лабораторная работа. Работа с реле.
- Лабораторная работа. Регуляторы.
- Лабораторная работа. Термостат.
- Лабораторная работа. Датчики газа.
- Работа над проектом.
- Работа над проектом.
Ресурсы для курса
- https://vk.com/wall-43363264_425750 Создаём нейронную сеть. Год издания [2017]. Автор Тарик Рашид
- https://stepik.org/course/9232/info Основы программирования на языке Python для школьников
- https://stepik.org/course/87973/syllabus 3D-моделирование в Компас-3D
- https://stepik.org/course/120924/promo?search=5639160667 Телеграм-боты на Python и AIOgram
10i_2025_it.txt · Последние изменения: 2025/04/01 15:43 — super_admin
Инструменты страницы
Если не указано иное, содержимое этой вики предоставляется на условиях следующей лицензии: CC Attribution-Share Alike 4.0 International
