Инструменты пользователя
10i_2025_algo
Это старая версия документа!
Содержание
10И Введение в робототехнику
Мобильные роботы на базе платы Arduino
- https://uchebnik.mos.ru/material/512435?sharing_key=8f5898c3-43bc-40d4-99b5-862287fd3dfb мобильный робот с дистанционным управлением
- https://wokwi.com/projects/344891652101374548 мигающий светодиод
Подключите к Arduino кнопку и три светодиода (макет светофора) и кнопку. Напиши код обработки нажатия кнопки. Каждый раз нажатием по кнопке светофор будет переключаться в следующее состояние. С красного на желтый, с желтого на зеленый, с зеленого на красный, и т.д.
КИБЕР-БОЙ
Тренировочное задание
- https://uchebnik.mos.ru/material/3697?menuReferrer=catalogue Моделирование роботов
- https://disk.yandex.ru/d/xwEHbzQcM1avVAg Дистанционное управление роботом
- https://disk.yandex.ru/i/xMA8bQK3cBFnKrg Подключение сервопривода (схема)
- https://disk.yandex.ru/d/xxYwty4bc2qFNWw Программа управления сервоприводом
- https://uchebnik.mos.ru/material/575801?sharing_key=8abe3114-a651-4d76-b836-de4c905f336f - ссылка на робота с манипулятором
- https://uchebnik.mos.ru/material/x581130?sharing_key=25ee8317-0888-402f-bde4-e2305745b89c - робот с манипулятором и захватом
Первый этап
- https://disk.yandex.ru/i/IsDYi906-dPCKw - Кибер-бой этап 1 презентация
- https://uchebnik.mos.ru/material/3696?menuReferrer=catalogue - Виртуальная лаборатория
- https://forms.yandex.ru/cloud/673f3a77f47e73ddb3681c59/ форма для отчёта
Второй этап



Сумматор двухразрядных чисел

Третий этап
- https://uchebnik.mos.ru/material/3697 - Виртуальная лаборатория: «Технология. Моделирование роботов»
- https://disk.yandex.ru/d/xbNtfVR2eoPMgg - ссылка на учебные материалы (задание, критерии оценки, презентация, демонстрация возможного результата)
- https://uchebnik.mos.ru/material/603925?sharing_key=725feac9-6787-4e7f-bd00-0cdfaa781676 Пример работы УЗ датчика v1
- https://uchebnik.mos.ru/material/603948?sharing_key=29f7b5b6-cca7-4fa5-8184-f551aa76c9d1 v2 Робот с гусеницами и УЗ
Вспомогательные ресурсы:
Справочник по функциям C++ для Arduino
- https://docs.arduino.cc/language-reference/en/functions/advanced-io/tone/ - функция для подключения кнопки
Виртуальные модели в Workwi
- https://wokwi.com/projects/415154760578950145 модель секундомера (недостаток: нет управляющей кнопки и токоограничительных резисторов)
- https://wokwi.com/projects/new/arduino-uno Симулятор Arduino Uno
Программирование микроконтроллеров на Arduino
- https://stepik.org/course/69511/syllabus Arduino в online. Быстрый старт !!!
- https://wokwi.com/projects/new/arduino-uno Симулятор Arduino Uno
Бегущие огни
int pin_0 = 7; int n = 0; void setup() { pinMode(7, OUTPUT); pinMode(6, OUTPUT); pinMode(5, OUTPUT); } void loop() { digitalWrite(pin_0 - n, 1); delay(100); digitalWrite( pin_0 - n, 0); n = (n + 1) % 3; delay(900); }
Подключение кнопки с учетом борьбы с дребезгом кнопок
// switch...case switch (var) { case 1: //do something when var equals 1 break; case 2: //do something when var equals 2 break; default: // if nothing else matches, do the default // default is optional break; }
- https://wokwi.com/projects/4213320841703188490 многофункциональная кнопка (ссылка закодирована)
Дополнительные учебные курсы по Arduino
Программирование ТРИК на Python!!!
- https://help.trikset.com/trik/programming-code справочная документация
- https://trikset.com/education/methodical методические рекомендации
- УРОКИ:
Виртуальные лаборатории МЭШ
- https://uchebnik.mos.ru/material/3697?menuReferrer=catalogue Моделирование роботов
Алгоритмы и структуры данных на языке программирования Python
Ресурсы
Яндекс Учебник
- https://education.yandex.ru/kids/ Вход для ученика
- У03300338 - код школы
Международная платформа с элементами игрофикации
Учебные курсы
- https://stepik.org/course/9232/promo Основы программирования на языке Python для школьников
- https://education.yandex.ru/ege Персональный ИИ‑помощник для подготовки к ЕГЭ по информатике
Программа
Работа с исполнителем Робот на языке Python (перемещение робота в среде исполнителя)
- Составные условия, операторы (Python), Цикл FOR (Python), Цикл While (Python)
- Решение задач с помощью циклов (Python)
- Задачи с исполнителем Робот
Строки в Python
- Индексы и срезы строк
- Сравнение строк, методв строк
Вещественные числа
- Вещественные числа и тип float. Округление
Массивы
- Массивы и основные операции с ними. Добавление элементов в массив
- Индексы элементов массива, срезы.Два типа циклов по массиву.
- Задачи поиска элемента в массиве. Решение и разбор задач
Методы списков/строк
- Методы: join(), split(), index(), count(), pop(), remove(), insert()
- Встроенные операторы и функции: in, not in, max, min
- Использование массивов для решения задач
Функции и модули
- Функции, основные понятия. Параметры функций
- Стандартная библиотека Python. Модули
- Рефакторинг
- Рекурсия
- Решение задач при помощи рекурсивных функций
- Чтение и запись данных в файл на Python
Задачи на алгоритмы
- Сложность алгоритмов
- Двумерные списки (массивы)
- Словари и множества
- НОД и НОК. Разбор и решение задач
- Простые числа и разложение на простые множители
- Сортировка. Задачи на сортировку
- Делители натурального числа
- Переборные алгоритмы
- Библиотека itertools для решения переборных и комбинаторных задач
- Динамическое программирование ч.1
- Динамическое программирование ч.2
- Кластерный анализ ч.1
- Кластерный анализ ч.1
- Алгоритмические задачи
Алгоритмы для исполнителя Черепаха
- Алгоритмы для исполнителя Черепаха ч.1
- Алгоритмы для исполнителя Черепаха ч.2
Алгоритмы из Codingame
# Автор: Леднёв Алексей a = [i for i in input().split()] k = len(a)*2-1 s = [[0 for i in range(k)]for i in range(k)] for l in range(len(a)) : for i in range(l,k-l) : for j in range(l,k-l) : if i == l or i == k-(l+1) or j == l or j == k-(l+1) : s[i][j] = a[l] for i in s : print(*i) ''' input 1 2 3 output 1 1 1 1 1 1 2 2 2 1 1 2 3 2 1 1 2 2 2 1 1 1 1 1 1 '''
n = int(input()) r = sum([int(input()) for i in range(n)]) print(f'{["Foo", "Bar"][r<0]} & {["Qux", "Baz"][r%2 == 0]}')
Codingame
08.10.24
10.10.24
15.10.2024
17.10.2024
22.10.2024
24.10.2024
const int LM_s1 = 10; // левый мотор вход 1 const int LM_s2 = 9; // левый мотор вход 2 const int RM_s1 = 5; // правый мотор вход 1 const int RM_s2 = 6; // правый мотор вход 2 int led_pin = 13; // Укажем пины для подключения УЗ датчика int trigPin = 12; int echoPin = 11; int s_for_obj = 0; // текущее состояние системы int state = 0; // начальное состояние void setup(){ Serial.begin(9600); //правый pinMode(RM_s1, OUTPUT); pinMode(RM_s2, OUTPUT); //левый pinMode(LM_s1, OUTPUT); pinMode(LM_s2, OUTPUT); // УЗ pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); // светодиод pinMode(led_pin, OUTPUT); } int dist() // функция для вычисления расстояния { int t,s; // локальные переменные время, расстояние // установить высокий уровень на пине Trig digitalWrite(trigPin, 1); // подождать 10 мс delay(10/16); digitalWrite(trigPin, 0); // узнаем время t = pulseIn(echoPin, 1); // вычисляем расстояние s = t * 0.034/2; return (s); } void loop() { s_for_obj = dist(); //Serial.println(s_for_obj );// вывод измеренного расстояния в окно сообщений //delay(20/16); Serial.println(state); switch (state) { case 0: // начальное состояние: вперёд до первого препятствия case 2: // после первого поворота: вперёд до второго препятствия if (s_for_obj == 0 || s_for_obj > 68){ moveForward(); } else { stopMotors(); state ++; } break; case 1: // перед первым препятствием: левый поворот case 3: // перед вторым препятствием: левый поворот turnLeft(); delay(2970/16); state ++; stopMotors(); break; case 4: // после второго поворота: прямолинейный путь до остановки moveForward(); delay(23000/16); // время прямолинейного движения до остановки state ++; stopMotors(); break; case 5: // после остановки на площадке: включить светодиод на 4 секунды digitalWrite(led_pin, 1); delay(4000/16); digitalWrite(led_pin, 0); state ++; break; case 6: // stopMotors(); break; default: stopMotors(); break; } } void moveForward() { //Serial.println("up"); digitalWrite(LM_s1, 1); digitalWrite(LM_s2, 0); digitalWrite(RM_s1, 1); digitalWrite(RM_s2, 0); delay(20); } void moveBackward() { //Serial.println("down"); digitalWrite(LM_s1, 0); digitalWrite(LM_s2, 1); digitalWrite(RM_s1, 0); digitalWrite(RM_s2, 1); delay(20); } void turnLeft() { digitalWrite(LM_s1, LOW); digitalWrite(LM_s2, HIGH); digitalWrite(RM_s1, HIGH); digitalWrite(RM_s2, LOW); delay(20); } void turnRight() { digitalWrite(LM_s1, HIGH); digitalWrite(LM_s2, LOW); digitalWrite(RM_s1, LOW); digitalWrite(RM_s2, HIGH); delay(20); } void stopMotors() { digitalWrite(LM_s1, LOW); digitalWrite(LM_s2, LOW); digitalWrite(RM_s1, LOW); digitalWrite(RM_s2, LOW); //delay(20); }
РОБОТ МФТИ
http://judge.mipt.ru/mipt_cs_on_python3/labs/lab2.html РОБОТ
- robot-tasks-master_.zip - Архив с файлами робота (модификация: в файле pyrob/api.py добавлен, приведенный ниже код, упрощающий написание команд (инструкций) управления роботом)
ml = move_left #Пройти n клеток влево (по умолчанию n = 1) mr = move_right #Пройти n клеток вправо (по умолчанию n = 1) mu = move_up #Пройти n клеток вверх (по умолчанию n = 1) md = move_down #Пройти n клеток вниз (по умолчанию n = 1) wu = wall_is_above #если сверху стена, возвращает True, иначе — False wd = wall_is_beneath #если снизу стена, возвращает True, иначе — False wl = wall_is_on_the_left #если слева стена, возвращает True, иначе — False wr = wall_is_on_the_right #если справа стена, возвращает True, иначе — False fill = fill_cell #Закрасить текущую клетку #cell_is_filled #Возвращает True, если текущая клетка закрашена #mov #Поместить значение v в регистр r
Пример решения первой задачи
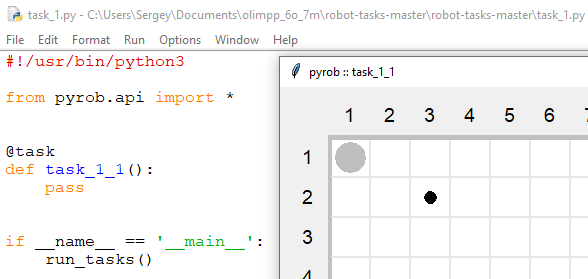
#!/usr/bin/python3 from pyrob.api import * @task def task_1_1(): #pass mr(2) # Пройти 2 клетки вправо или: move_right(2) md(1) # Пройти 1 клетку вниз или: move_down(2) if __name__ == '__main__': run_tasks()
10i_2025_algo.1740746491.txt.gz · Последние изменения: 2025/02/28 15:41 — super_admin
Инструменты страницы
Если не указано иное, содержимое этой вики предоставляется на условиях следующей лицензии: CC Attribution-Share Alike 4.0 International
